11. Convolution
11. Convolution
Convolution
Prerequisites
1
python
1. Convolution
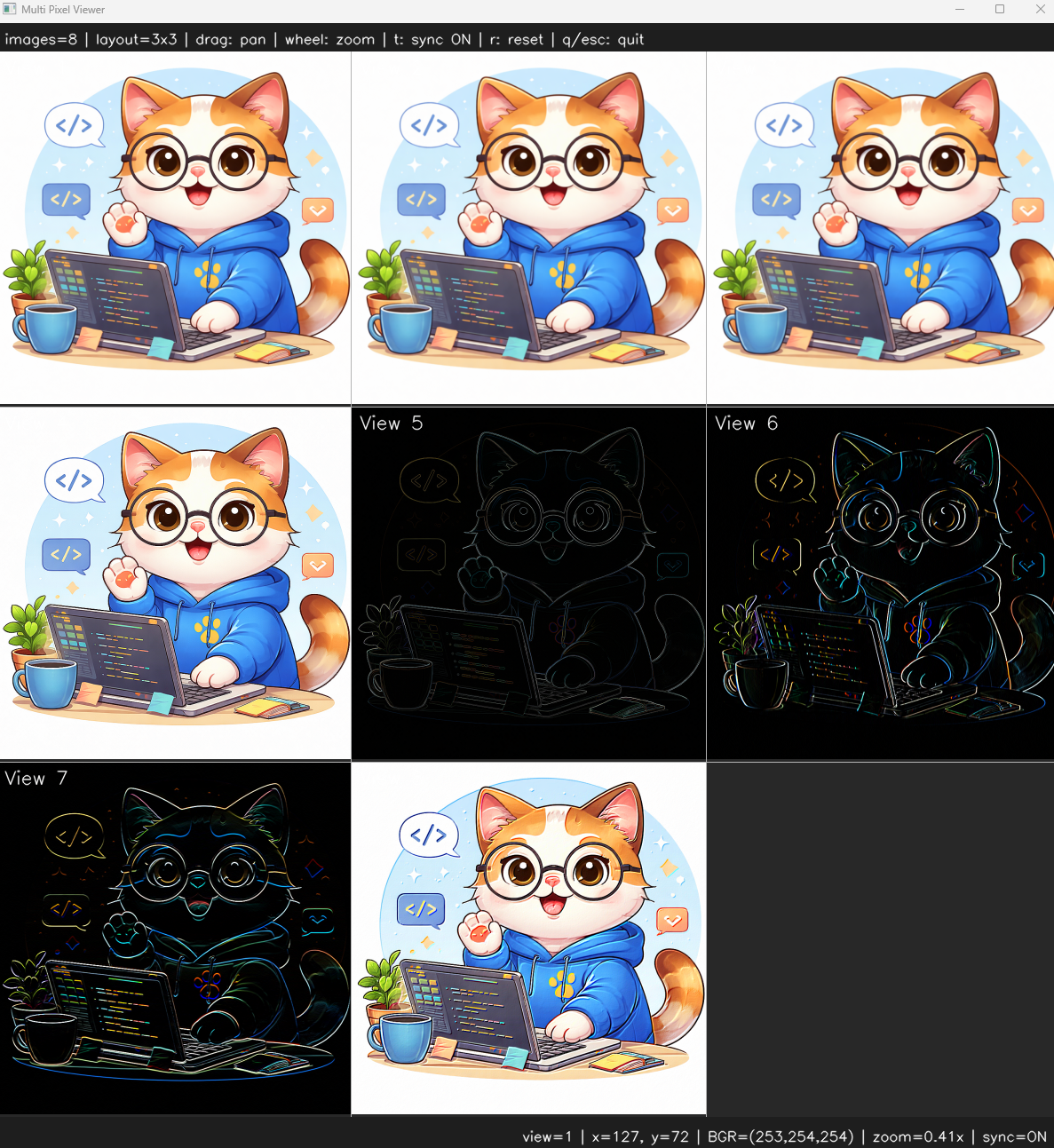
Convolution is very popular algorithm as you know. It makes features smoothing/blurring, enhancing image. Furthermore, Edge detection and Feature extraction algorithms are also using this method.
This is based on kernel. How to you build the kernel, the result is different. No matter how much i emphasize it, it’s never enough.
2. Convolution Code
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
import cv2 as cv
import os
from enum import Enum
class KernelType(Enum):
GAUSSIAN_BLUR = 0
UNIFORM_BLUR = 1
SHARPEN = 2
LAPLACIAN = 3
SOBEL_X = 4
SOBEL_Y = 5
EMBOSS = 6
def convolution3x3(img, kernel_type):
if kernel_type == KernelType.GAUSSIAN_BLUR:
kernel_1d = cv.getGaussianKernel(3, 0)
kernel = kernel_1d @ kernel_1d.T # np.outer(kernel_1d, kernel_1d)
elif kernel_type == KernelType.UNIFORM_BLUR:
kernel = np.ones((3, 3), dtype=np.float32)
kernel /= 9
elif kernel_type == KernelType.SHARPEN:
kernel = np.array([
[0, -1, 0],
[-1, 5, -1],
[0, -1, 0]
], dtype=np.float32)
elif kernel_type == KernelType.LAPLACIAN:
kernel = np.array([
[0, 1, 0],
[1, -4, 1],
[0, 1, 0]
], dtype=np.float32)
elif kernel_type == KernelType.SOBEL_X:
kernel = np.array([
[-1, 0, 1],
[-2, 0, 2],
[-1, 0, 1]
], dtype=np.float32)
elif kernel_type == KernelType.SOBEL_Y:
kernel = np.array([
[-1, -2, -1],
[ 0, 0, 0],
[ 1, 2, 1]
], dtype=np.float32)
elif kernel_type == KernelType.EMBOSS:
kernel = np.array([
[-2, -1, 0],
[-1, 1, 1],
[ 0, 1, 2]
], dtype=np.float32)
else:
raise ValueError("Invalid kernel type")
return cv.filter2D(img, -1, kernel)
1
2
3
4
5
6
7
8
9
10
11
12
if __name__ == "__main__":
img = ImageUtils.readImage(ImageUtils.getDataPathWithFile("cat.png"))
imgGaussian = ip.convolution3x3(img, ip.KernelType.GAUSSIAN_BLUR)
imgUniform = ip.convolution3x3(img, ip.KernelType.UNIFORM_BLUR)
imgSharpen = ip.convolution3x3(img, ip.KernelType.SHARPEN)
imgLaplacian = ip.convolution3x3(img, ip.KernelType.LAPLACIAN)
imgSobelX = ip.convolution3x3(img, ip.KernelType.SOBEL_X)
imgSobelY = ip.convolution3x3(img, ip.KernelType.SOBEL_Y)
imgEmboss = ip.convolution3x3(img, ip.KernelType.EMBOSS)
viewer = view.MultiImageViewer.from_images(img, imgGaussian, imgUniform, imgSharpen, imgLaplacian, imgSobelX, imgSobelY, imgEmboss, sync_view=False)
viewer.run()
This post is licensed under CC BY 4.0 by the author.