Why Pattern Matching Scores Cluster
🎯 Practical Observation
Implement a pattern matcher and you’ll notice something striking:Scores explode near the correct location — and collapse almost everywhere else.
This is not coincidence. It reflects a core computer vision property.
🧠 The Phenomenon: Score Clustering
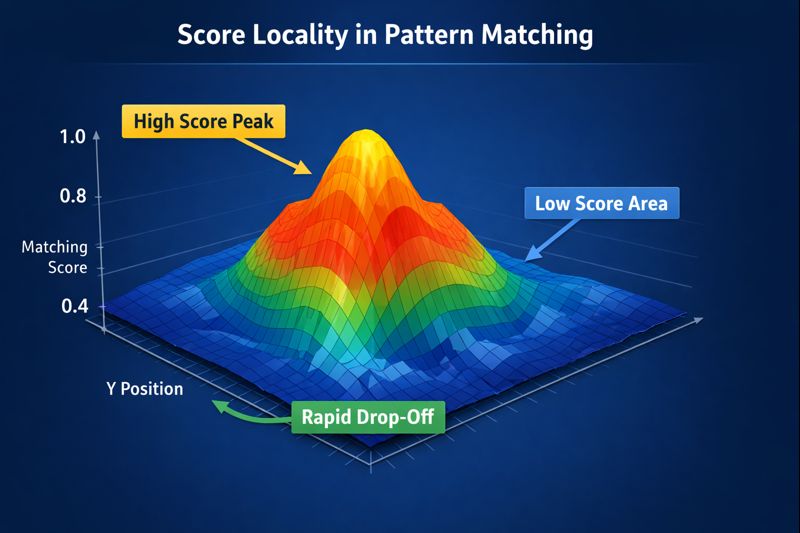
In real-world pattern matching, score maps rarely look smooth or evenly distributed.
Instead, they show:
- 🔺 One dominant peak
- 📉 Rapid decay away from the peak
- 🟦 Vast background regions with low or near-zero scores
This behaviour is best described as score locality.
📍 What Does “Locality” Mean in CV?
In computer vision terms, locality means:
Matching confidence is concentrated within a small spatial neighbourhood.
Concretely:
- Small spatial shifts → small score changes
- Larger misalignments → sudden score collapse
The score map forms a concentrated energy landscape, not random noise.
🗺️ Visual Intuition (Score Map)
1
2
3
4
5
Low Low Low Low Low
Low Low High Low Low
Low High MAX High Low
Low Low High Low Low
Low Low Low Low Low
🔴 The correct match appears as a sharp local maximum, not a wide plateau.
🔎 Why Does This Happen? (Vision Interpretation)
🧩 1. Structural Overlap
Most matchers measure structural agreement:
- intensity alignment
- gradient consistency
- edge or shape overlap
Near the correct position:
- Structures still overlap
- Scores remain high
Farther away:
- Overlap breaks rapidly
- Scores drop off a cliff
📐 2. Correlation Is Naturally Peaked
Many classical vision matchers rely on correlation-like operations:
- cross-correlation
- normalised cross-correlation
- dot products in feature space
📌 Correlation is inherently peaked when signals align — a mathematical property, not a tuning artefact.
🌌 3. High-Dimensional Feature Separation
In feature-based matching:
- Each location maps to a high-dimensional vector
- The correct match lies close to the template vector
- Most background locations are far away
In high dimensions:
- Good matches stand out dramatically
- Background collapses into uniformly low scores
⚙️ Engineering Consequences
Understanding score locality directly informs system design.
🚀 Early Rejection
Because most locations are clearly wrong:
- Cheap tests reject them early
- Expensive scoring runs only locally
This enables cascade-style matchers.
🪜 Coarse-to-Fine Search
Locality makes hierarchical strategies effective:
1️⃣ Coarse scan
2️⃣ Detect promising regions
3️⃣ Refine locally
This avoids full-resolution brute-force evaluation.
⏱️ Stable Runtime
Localised peaks imply:
- Predictable candidate counts
- Low runtime variance
Critical for real-time and industrial systems.
✂️ Relation to Non-Maximum Suppression (NMS)
NMS relies on locality:
- Keep the strongest response
- Suppress neighbouring ones
Without score locality, NMS would be unreliable.
⚠️ When Locality Weakens
Locality degrades when:
- Patterns are repetitive or symmetric
- Background contains similar structures
- Noise dominates signal
In such cases:
- Multiple peaks emerge
- Additional constraints become necessary
💡 A Computer Vision Takeaway
Pattern matching outputs are structured landscapes, not random fields.
Thinking in terms of:
- energy distributions
- local maxima
- spatial confidence
is a computer-vision mindset, not just an algorithm trick.
✅ Summary
- 🔹 Pattern matching scores cluster spatially
- 🔹 This reflects score locality
- 🔹 Locality explains why NMS, early rejection, and coarse-to-fine search work
- 🔹 Interpreting score maps leads to better system-level design
✨ Seeing the structure behind algorithm outputs is what turns code into engineering.